Homogeneous Transformation Matrix
Homogeneous Transformation Matrix - Learn how to use homogeneous transformation matrices to represent configurations, change reference frames, and compute linear and. Learn how to describe translational and rotational displacements of vectors using homogenous transformation matrices. See examples of affine, perspective,. Learn how to represent general transformations of homogeneous coordinates by 3x3 matrices in 2d and 3d. Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. • there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice.
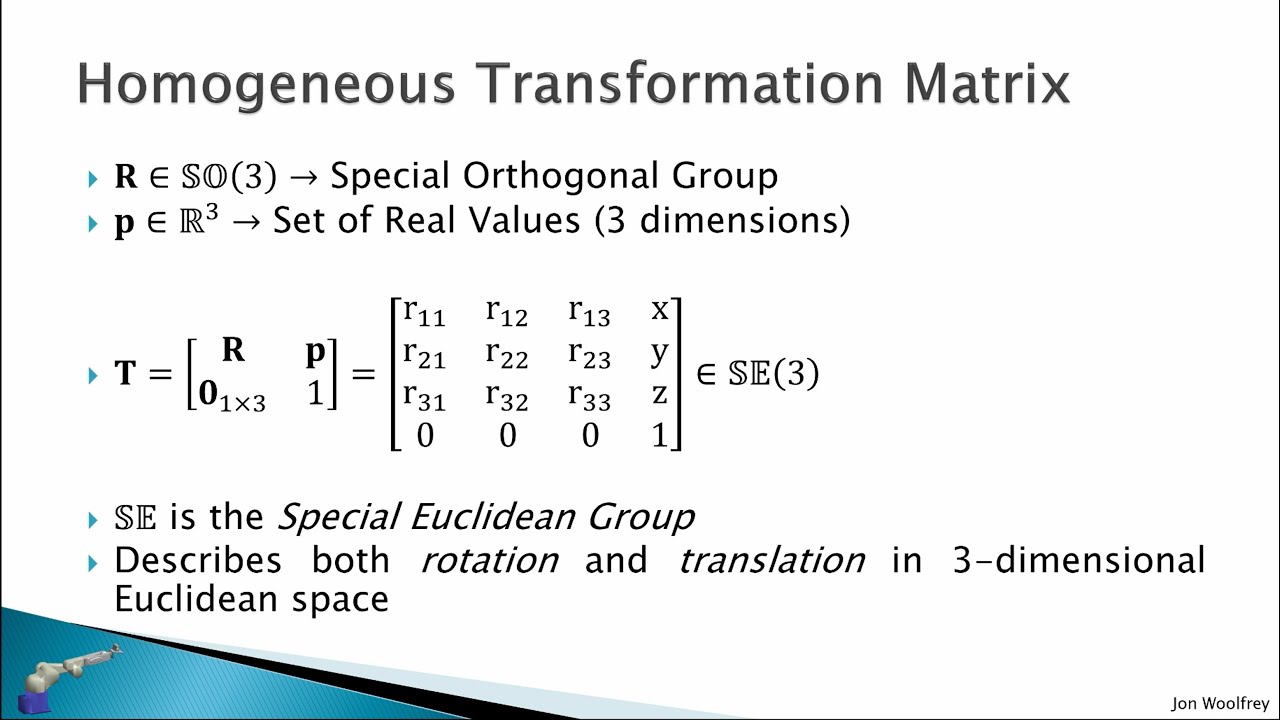
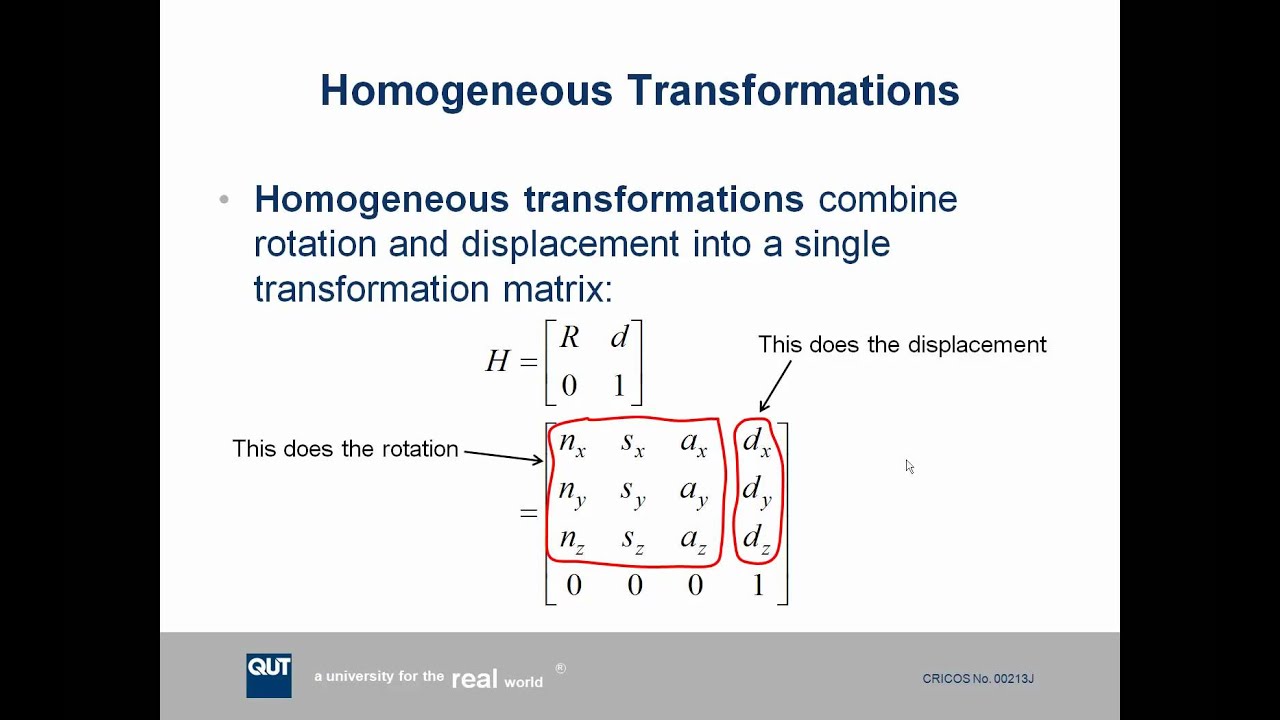
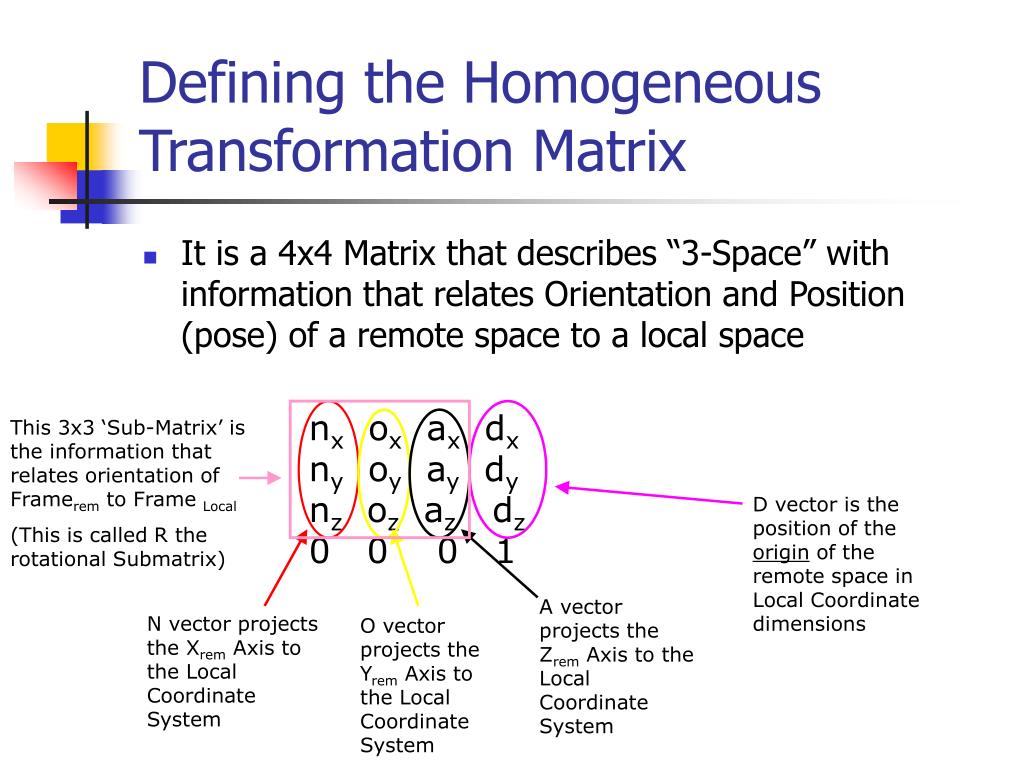
Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. Learn how to represent general transformations of homogeneous coordinates by 3x3 matrices in 2d and 3d. See examples of affine, perspective,. Learn how to use homogeneous transformation matrices to represent configurations, change reference frames, and compute linear and. • there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice. Learn how to describe translational and rotational displacements of vectors using homogenous transformation matrices.
Learn how to represent general transformations of homogeneous coordinates by 3x3 matrices in 2d and 3d. Learn how to use homogeneous transformation matrices to represent configurations, change reference frames, and compute linear and. • there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice. See examples of affine, perspective,. Learn how to describe translational and rotational displacements of vectors using homogenous transformation matrices. Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix.

Homogeneous Transformation Matrix (a) and Global Homogeneous
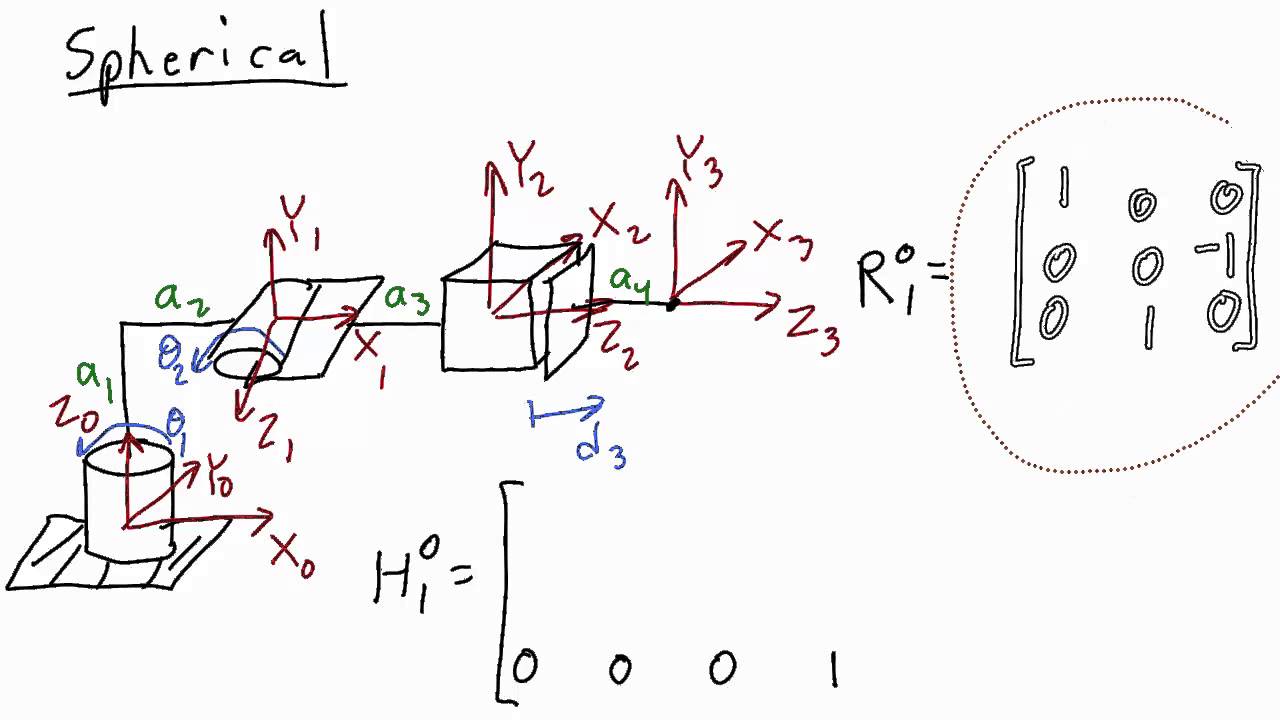
• there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice. See examples of affine, perspective,. Learn how to use homogeneous transformation matrices to represent configurations, change reference frames, and compute linear and. Learn how to describe translational and rotational displacements of vectors using homogenous transformation matrices. Introduce the.
3.1 Transformation Matrices YouTube
Learn how to represent general transformations of homogeneous coordinates by 3x3 matrices in 2d and 3d. Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. See examples of affine, perspective,. Learn how to use homogeneous transformation matrices to represent configurations, change reference frames, and compute linear and. Learn how to describe translational.

Lecture 2 3 Homogeneous Transformations (Robotics UTEC 20181) YouTube
Learn how to represent general transformations of homogeneous coordinates by 3x3 matrices in 2d and 3d. See examples of affine, perspective,. • there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice. Learn how to describe translational and rotational displacements of vectors using homogenous transformation matrices. Introduce the notion.
Transformation Matrices Part 3 YouTube
See examples of affine, perspective,. Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. Learn how to use homogeneous transformation matrices to represent configurations, change reference frames, and compute linear and. Learn how to represent general transformations of homogeneous coordinates by 3x3 matrices in 2d and 3d. Learn how to describe translational.
1 1 5 Lecture Video 1 of 1 Homogeneous Transformation Matrix Example
See examples of affine, perspective,. Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. Learn how to describe translational and rotational displacements of vectors using homogenous transformation matrices. • there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice. Learn how.

Homogeneous Transformation Matrices 3 x 3 Rotation Matrix
Learn how to use homogeneous transformation matrices to represent configurations, change reference frames, and compute linear and. Learn how to describe translational and rotational displacements of vectors using homogenous transformation matrices. See examples of affine, perspective,. Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. • there are a large number of.

1 1 5 Lab Video 3 of 4 Find Homogeneous Transformation Matrix YouTube
Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. Learn how to use homogeneous transformation matrices to represent configurations, change reference frames, and compute linear and. • there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice. See examples of affine,.
PPT ME 4135 Robotics & Control PowerPoint Presentation, free download
Learn how to describe translational and rotational displacements of vectors using homogenous transformation matrices. • there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice. Learn how to represent general transformations of homogeneous coordinates by 3x3 matrices in 2d and 3d. Learn how to use homogeneous transformation matrices to.
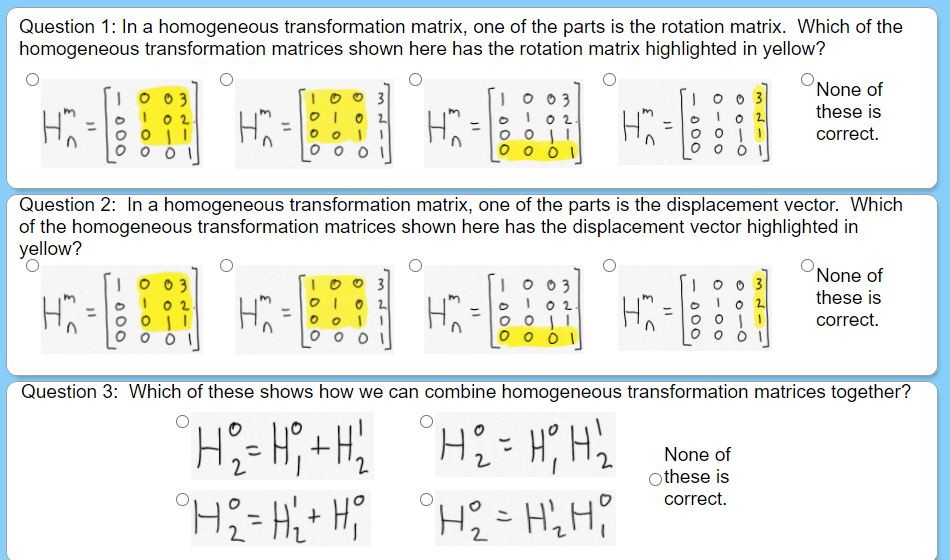
Solved Question 1 In a homogeneous transformation matrix,
Learn how to represent general transformations of homogeneous coordinates by 3x3 matrices in 2d and 3d. Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. Learn how to describe translational and rotational displacements of vectors using homogenous transformation matrices. See examples of affine, perspective,. Learn how to use homogeneous transformation matrices to.

Introduction to Homogeneous Transforms in Robotics YouTube
• there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice. Learn how to represent general transformations of homogeneous coordinates by 3x3 matrices in 2d and 3d. Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. See examples of affine, perspective,..
Learn How To Represent General Transformations Of Homogeneous Coordinates By 3X3 Matrices In 2D And 3D.
Learn how to use homogeneous transformation matrices to represent configurations, change reference frames, and compute linear and. Introduce the notion of homogeneous transformations (combining the operations of rotation and translation into a single matrix. • there are a large number of ways that homogeneous transforms can encode the kinematics of a manipulator • we will sacrifice. See examples of affine, perspective,.